SCALER¶
Mechanical Designs¶
-
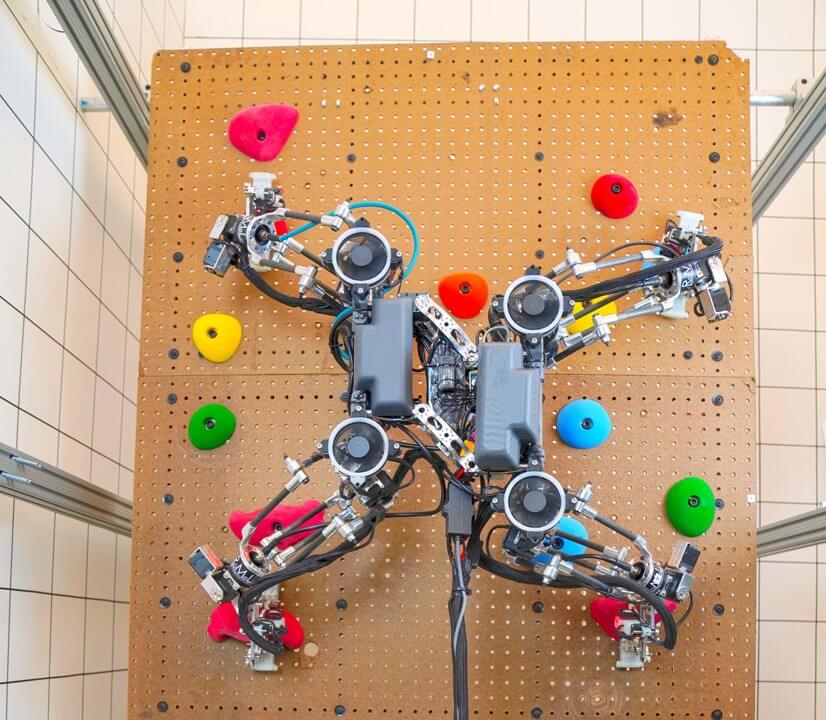
SCALER Rendering
- SCALER (Spine-enhanced Climbing Autonomous Limbed Exploration Robot)
-
Parallel Linkage Limb Design
- Strictly Coupled Loco-Grasping: SCALER balances power-intensive locomotion and dexterous grasping.
- 5-bar linkage mechanism
-
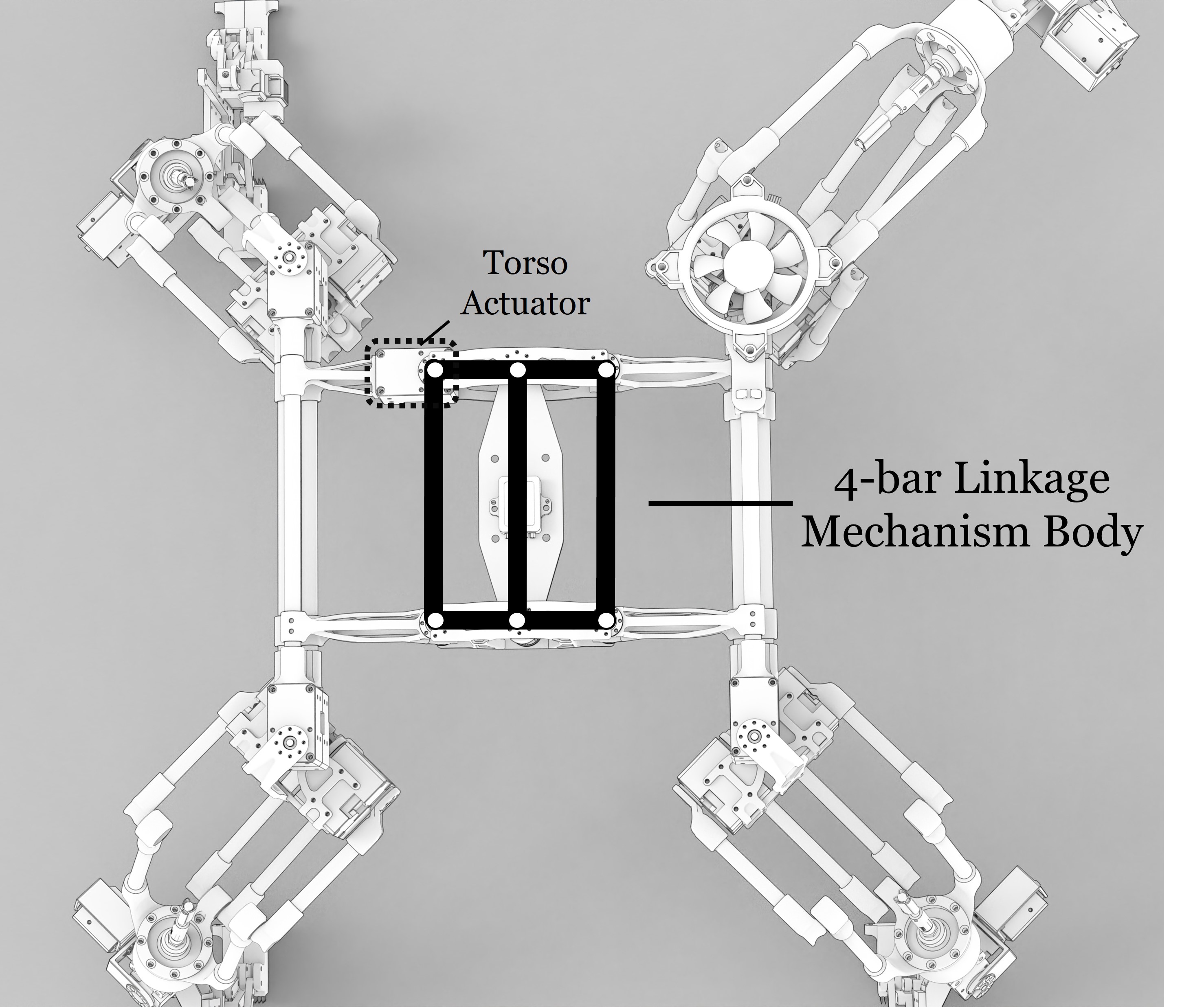
Torso Mechanism
- 1 DoF torso / 4-bar linkage
-
Torso Motion
- Shift workspace on demand
- Realize human stretch motion
End Effector (GOAT Gripper)¶

Capabilities¶
-
Sidepull Whole-Body Climbing
-
Ground Trot
-
Trotting with Payload
-
Dynamic Climbing
-
Sidepull Whole-Body Climbing
-
Sidepull Whole-Body Climbing
-
Vertical with Payload
-
Overhang Climbing
-
Upsidedown Ceiling Walking
-
Upsidedown Ceiling Walking on Slippery Surface
Key Characteristics¶
- Multi-Modal Grasping: Employs C-GOAT grippers, which enable 7 grasping modes.
- Whole-Body Approach: Uses body and limbs to generate extra forces for stable grasping.
- Dynamic Climbing: Improves actuation speed for faster grasping and climbing.
- Versatile Terrain Navigation: Successfully climbs vertical walls, overhangs, ceilings, and slippery surfaces.
- Spine-Enhanced Free Climbing: Combines mechanical design and force control to enhance climbing stability.